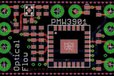
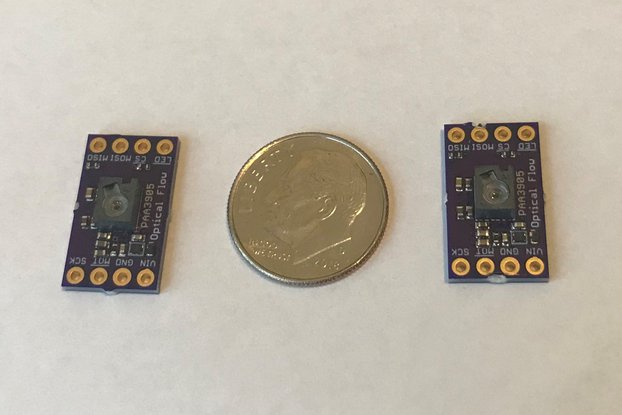
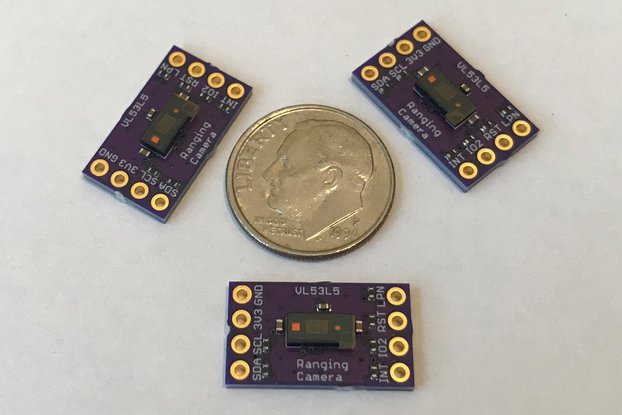
Optical flow sensor for accurate lateral (x & y) velocity measurement
Designed by Pesky Products in United States of America
Buy with confidence.
Our Tindie Guarantee protects your purchase from fraud. Learn More
Buy with confidence.
Our Tindie Guarantee protects your purchase from fraud. Learn More

$49.95
$5.95
$35.95
$35.95
$49.95
$19.95
$12.95
$19.95
/i/44691/products/2018-03-30T21%3A41%3A52.950Z-PMW3901.group.jpg?1606306133)